This is the seventh of probably fourteen in a series of posts, each chronicling in detail the ins and outs of my Robotics class on a weekly basis. I teach an introductory course using the LEGO Mindstorms EV3 set. My students are 7th graders who are required to take the course and may not necessarily have any background in programming/building. My school is on a trimester schedule so the course runs for thirteen weeks at a time. For this particular trimester I have one class of twenty-four students and one class of thirty-four students. I meet each class for one 50-minute period each day, five days a week. I have thirty-four computers in my classroom and one EV3 kit for every two students. I’ve been teaching this class in its current form for two years, though I’ve been teaching Robotics for eight all together.
In my previous post, A Week in the Life #5, our drag racers and uphill climbers weren’t exactly ready to compete like those above. This week we completed the building process, tested out the robots and looked for ways to make tiny improvements in order for students to increase their scores.
One group of students decided that their back wheel was slowing them down. I was sorely tempted to tell them to try taking the tire off to reduce friction, but when they suggested removing the entire wheel, I bit my tongue. It’s so hard as a teacher to let your students make mistakes, but it’s so important for the learning process. Watch what happened:
You can probably hear by the sound of my voice that I was confused as to why they were taking their wheel off, but I went with it. I think they learned better going through this process:
While some students were working on their drag racers, others were discovering what a low center of gravity does for their robot when driving uphill:
This young student in the next clip, had an inkling about the placement of the heaviest piece (the intelligent brick) and how it was affecting her robot; but as much as I wanted to yell, “Low center of gravity!” I refrained so that she could work on her own ideas about weight placement over wheels. I knew we’d get to center of gravity eventually.
Some students made some great strides, while others committed common mistakes:
Btw, you may recall in A Week in the Life #4 I told you that due to statewide testing, I was moved out of my room and had to work in the gymnasium a few days, hence the different surroundings in the above videos and some others.
This next one is more common than you may think:
As is the straying robot:
Before I get to some of the great successes we achieved by the end of this week, let me pause and talk to you about my rubrics for success and my method of timing the drag racers.
In all my units in this class, I have two rules for my rubrics: They must be really simple for me to use and they must have some form of student input. Our school uses an ABCI grading scale where A means you’re above standard, B is at standard, C is approaching standard, and I is incomplete meaning you can make the work up at a later time. For the uphill climber, I use different levels of height determined (pretty arbitrarily) by the drawers in the back of the shop.
If you’ve meshed gears together properly for the type of vehicle you want, and it barely works, you still receive a C in my book. Even a vehicle without meshed gears should be able to reach the C-level in the book above.
For the drag racers, we use time. I have a 20-foot race course painted on the floor of my classroom. In my head, I always have 3.5 seconds and faster as an A, but I usually ask for student input to figure out the time ranges. Below is a picture from each of my classes showing both the grade ranges and the scores of students.
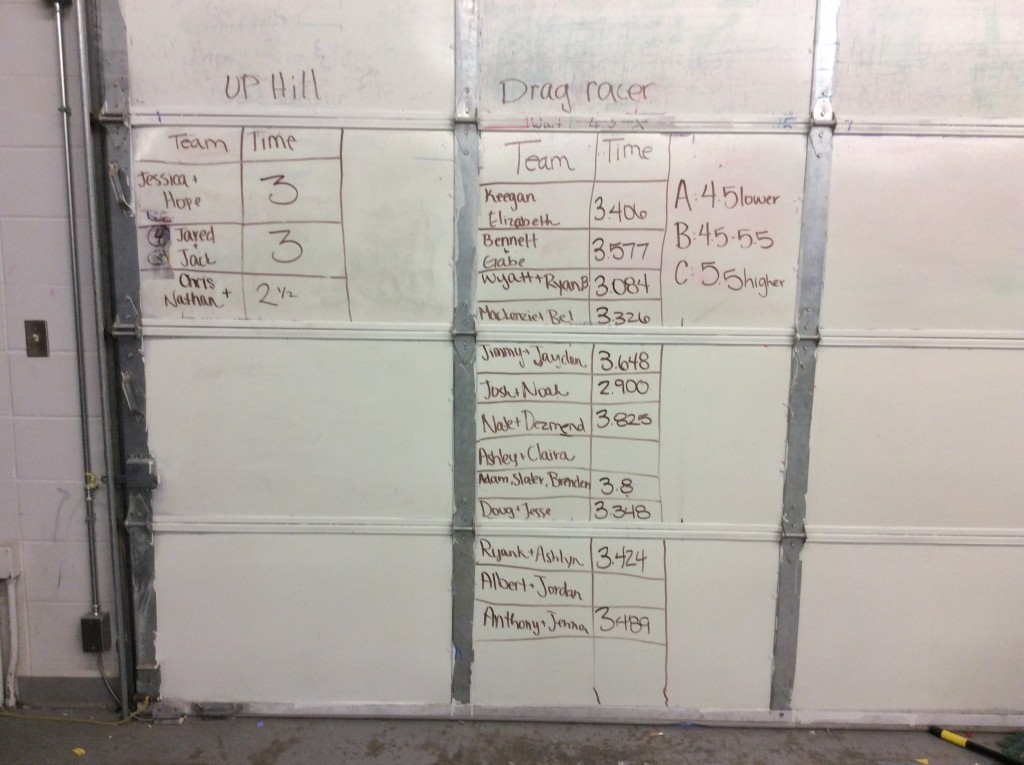
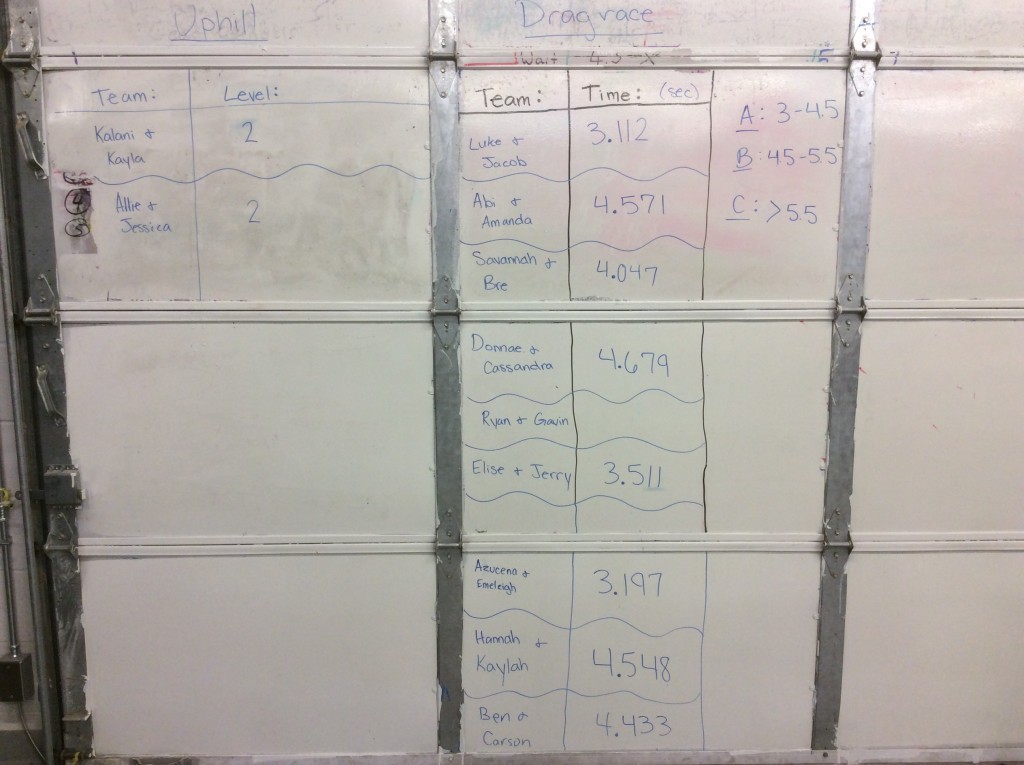
Notice the different times for the drag racers to achieve an A in each class; this is a function of allowing the students to help design the rubrics.
Damien Kee wrote a post about timing drag racers on his site a few years ago. I can’t upload .ev3 files to this site, but I’ll do my best to explain here, show a video and a screenshot of the program.
Two robots, drag racer and Timer Bot, are each equipped with NXT sound sensors. I stand equidistant from both bots. When I yell “go!” programs on both robots start running. On the Timer Bot program I reset the timer before anything, I don’t think this stage is needed, but do it anyway. When the sound is heard, the timer starts. When an object (hopefully the drag racer) passes in front of Timer Bot, an ultrasonic sensor picks up the racer and stops the timer, while simultaneously making a beep to let us know it worked. The time is then read and displayed on the screen.
Here’s a video of Timer Bot in action:
Here’s a screenshot of the program:
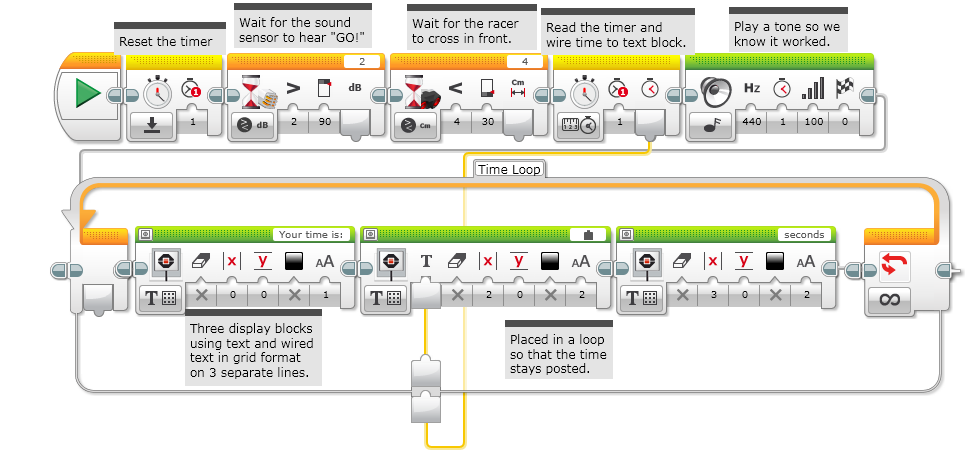 Some caveats to watch for: It’s very difficult for the ultrasonic sensor to pick up a fast moving object, especially if there’s no surface totally perpendicular to the sensor on the drag racer. The ultrasonic sensor likes to bounce off of flat surfaces. Students will make noise and set the timer off, which is why we add the sound; it lets us check the Timer Bot by waving a hand in front of it to see if the program had started.
Some caveats to watch for: It’s very difficult for the ultrasonic sensor to pick up a fast moving object, especially if there’s no surface totally perpendicular to the sensor on the drag racer. The ultrasonic sensor likes to bounce off of flat surfaces. Students will make noise and set the timer off, which is why we add the sound; it lets us check the Timer Bot by waving a hand in front of it to see if the program had started.
I’ve loved my Timer Bot but this year I will try another method and let you know how it worked in an update.
Even with Timer Bot I’m not sure how accurate our timing methods are, but any time that is under three seconds for a 20 foot course is pretty cracking good. We get a few 2.9n seconds each class, but most times fall in-between 3.5 and 4.5 seconds.
Here’s a little more practice:
And here’s one of the fastest we had:
I’m used to students using four wheel drive to make help their uphill climbers but this team blew me away with their take on a way to really lower the center of gravity:
Even though they totally conquered the challenge, they were eager to try for more:
Which they accomplished with a slight modification:
I love how this team (twins) explained their success:
And that’s all there is to it. I’ll use the above video as part of the resources I create for my next class as I think those two do a real nice job of explaining things. I’d love to hear about/see the sorts of things you’re doing with your classes regarding gears and gear ratios. Post some ideas and links in the comments.
Two final things. Sometimes students will try to see how well their drag racer does on the uphill climb challenge. I say let them try it and see what happens.
And to end with, let them have fun!
Also in A Week in the Life
Ian Chow-Miller covers the highs and lows of his introductory robotics class for 7th graders.
- A Week In the Life #5: Vroom, Vroom, Up, Up, and Away!
- A Week in the Life #6: Faster and Steeper
- A Week in the Life #7: Sensor Fun
Latest posts by Ian Chow-Miller (see all)
- Using Video to Assess Robotics Students - 21 November 2018
- A Week in the Life #12: Robot Monsters! - 9 February 2017
- A Week in the Life #11: Sumobot to Battlebot - 28 June 2016
- A Week in the Life #10: Candy Sorter - 27 June 2016
- A Week in the Life #9: Walk This Way… - 23 November 2015