Skip to content
LEGO
®
Engineering
Getting Started
Inspiration
Challenge Ideas
Reflections
Big Ideas
Pedagogy
Support
Getting Started
How To
Reference
News and Events
News
Conferences
About
The EDGErs
Site Contributors
Tufts CEEO
How To
The Heart of the Hub
SPIKE Prime
Getting Started
How To
Yellow Diamond Error in EV3 Software
EV3
How To
Harvey Mk II: Improved Quick EV3 Robot Build
EV3
Challenge Ideas
How To
How to Toggle a Motor On/Off With a Touch Sensor
EV3
How To
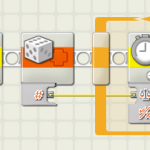
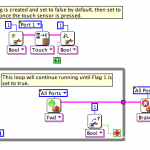
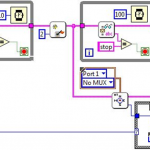
How to Wait for More than One Sensor Condition
EV3
How To
Why Doesn’t My Robot Drive Straight?
Cross-Platform
,
EV3
Featured
How To
Pedagogy
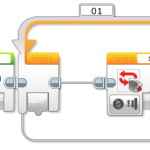
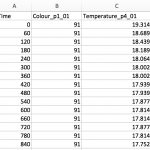
How to export an EV3 data file (*.rdf) to Excel
EV3
How To
Tilt-to-Drive Android App for WeDo 2.0
WeDo
How To
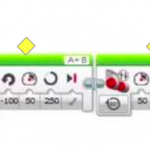
Light and Gryo Sensor Calibration
EV3
How To
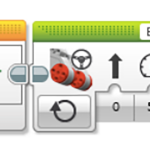
Rookie EV3 tip: Motor “On” mode
Challenge Ideas
How To
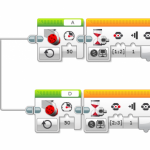
To light or not to light
EV3
How To
How to reconnect a task split
EV3
How To
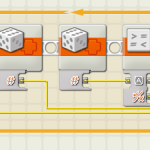
From Sequential Programming to State Machines
EV3
Challenge Ideas
How To
Programming Bluetooth on EV3
EV3
How To
Reflections
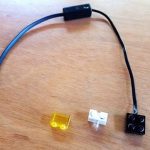
Building with RCX/NXT lamps and EV3 pieces
EV3
,
NXT
,
RCX
How To
Reflections
RCX USB tower support
RCX
,
ROBOLAB
Getting Started
How To
Darkness or darker?
EV3
,
LabVIEW
Big Ideas
How To
Optimal Prime: Another quick EV3 robot build
EV3
How To
EV3 gone wrong: What to do when your EV3 stops working
EV3
How To
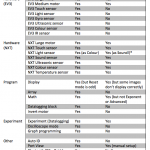
EV3 Software compatibility with NXT
EV3
,
NXT
How To
Reference
EV3 tutorials: By students, for students
EV3
Getting Started
How To
NXT-G examples: Motors
NXT
How To
NXT-G examples: Sounds, displays, and delays
NXT
How To
The Harvester: A quick EV3 robot build
EV3
Challenge Ideas
How To
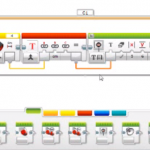
Using EV3 software to run the NXT
EV3
,
NXT
Getting Started
How To
RicEditor tutorial: Create a cannon game
LabVIEW
Challenge Ideas
How To
LabView examples: Projects
LabVIEW
,
NXT
How To
LabView examples: Programming structures
LabVIEW
How To
LabView examples: Sound
LabVIEW
How To
LabView examples: Display
LabVIEW
How To
ROBOLAB examples
ROBOLAB
Downloads
How To
LabView examples: Sensors
LabVIEW
Downloads
How To
RCX constructopedia
RCX
Downloads
Getting Started
How To
Reference
EV3 rechargeable battery issue
EV3
Getting Started
How To
News
LabView Examples: Motors
LabVIEW
Downloads
How To
NXT Constructopedia
NXT
Downloads
Getting Started
How To
NXT-G power programming tips
NXT
Getting Started
How To
Create your own games with “RIC” files
LabVIEW
,
NXT
How To
Image processing in LabVIEW
LabVIEW
Downloads
How To
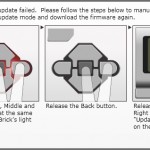
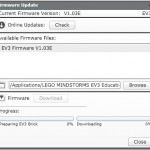
How to update the EV3 firmware
EV3
How To
How to update the NXT firmware in LabVIEW
LabVIEW
How To
How to update the NXT firmware in NXT-G
NXT
How To
How to write efficient NXT-G programs
NXT
Downloads
How To
General building tips and tricks
Cross-Platform
Getting Started
How To
Light theremin
Cross-Platform
,
NXT
Challenge Ideas
How To
LabVIEW examples: Advanced
LabVIEW
Downloads
How To
NXT-A-Sketch
LabVIEW
Challenge Ideas
How To
Motor vs Move – Part II: Action
NXT
How To
A simple TETRIX robot
LabVIEW
Getting Started
How To
NXT car with NXT bluetooth remote
LabVIEW
,
NXT
How To
MIDI and the NXT
Cross-Platform
,
LabVIEW
,
NXT
How To
Datalogging in LabVIEW: Timed datalogging
LabVIEW
How To
LEGO WeDo Mac OSX 10.7 issues
WeDo
How To
LabVIEW basics
LabVIEW
Getting Started
How To
Third Wheel
Cross-Platform
,
EV3
,
NXT
Getting Started
How To
Clicking brick syndrome
NXT
How To
Three troubleshooting tips for NXT-G
NXT
How To
Introduction to LabVIEW
LabVIEW
Getting Started
How To
NXT-G quick programming guide
NXT
Getting Started
How To