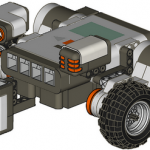
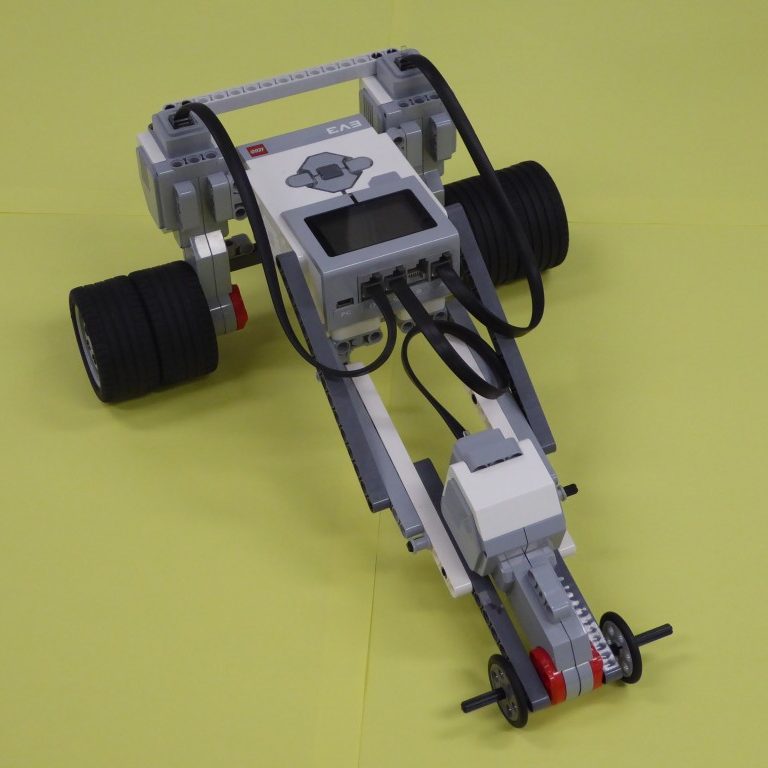
 The idea for this challenge is to design and build a dragster than can measure and display its speed.
The idea for this challenge is to design and build a dragster than can measure and display its speed.
The robots will be racing on a 4-metre race track with a black finish line at the end.
Constraints
The robot can have as many motors and wheels as you like, and be as big as you like, but it can only have one EV3 brick and the motors from a single kit.
The robots will start to with their light sensors just over the starting line, and must not start moving until they hear a loud sound (i.e. “go”).
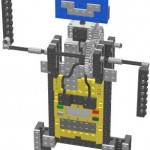
Robot design
Before you start building, you should consider some alternatives and do some research… Your options might include one more more motors, gearing the motors up or down, …?
Other design factors to consider include gear ratios, friction, and the centre of mass of your robot.
Program
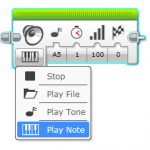
The program for this robot will be nice and simple – the program should wait for the sound sensor to hear a noise and then turn on the motor(s). The robot should wait until it sees the finish line and then set the motors to coast.
Assessment
| Grade |
Aesthetics |
Performance |
| A+ | Mega-awesome | Your robot wins (and does all the other stuff) |
| A | Awesome | Your robot displays its speed as well as the time |
| B | Good | Your robot stops (coasts) at the end and displays the time |
| C | Okay | Your robot starts when it hears “go” |
| t | Look away! | You have something resembling a vehicle |
| Z | Nothing to show | )-: |
Rob Torok
Latest posts by Rob Torok (see all)
- Obstacle Course - 26 August 2020
- Crash Test Dummy - 26 August 2020
- The Wave - 21 May 2020
- Build X - 20 May 2020
- Build a Duck - 20 May 2020