Skip to content
LEGO
®
Engineering
Getting Started
Inspiration
Challenge Ideas
Reflections
Big Ideas
Pedagogy
Support
Getting Started
How To
Reference
News and Events
News
Conferences
About
The EDGErs
Site Contributors
Tufts CEEO
Tag:
green’s theorem
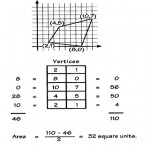
Area Measurement: Follow the Path
Big Ideas