Last term, I had to assess my Year 7 (12 year old) Technology students on design, robotics, structures and mechanics and all within 10 weeks/ 20 lessons.
Last term, I had to assess my Year 7 (12 year old) Technology students on design, robotics, structures and mechanics and all within 10 weeks/ 20 lessons.
To avoid teaching 3 separate strands, each with theory, practical and mini design problems, I wanted combine them into one complex design problem. This led to the creation of the ‘Robo-Basketballer’ challenge.
 Each robot starts with a ball and has to ‘dribble’ (carry it) from one end of the board and shoot it through one of the hoops. Each team of 2 students has to complete a design folio, build, test and reflect on their design and solution.
Each robot starts with a ball and has to ‘dribble’ (carry it) from one end of the board and shoot it through one of the hoops. Each team of 2 students has to complete a design folio, build, test and reflect on their design and solution.
The three height levels of hoops demonstrated how tall and stable their robot structures were. The higher the hoop and the more stable the design – the higher the grade awarded.
The robotic element was assessed by the complexity of their programs and what sensors they used. Some students used ‘simple movement’ blocks, others students used ‘movement and wait for’ blocks, some tried a line following program.
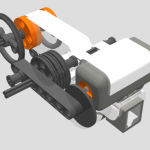
The mechanism component looked at how the ball could be ‘shot’ through the hoop. The solution range was astounding – a crane, a simple ‘hand’, a cantilever arm and a cam and follower.
The depth of critical thinking and problem-solving demonstrated by the students was far superior than the 3 separate strands would have shown.
From more information contact Mark Lockett: mark.lockett@tss.qld.edu.au