Nevada, July 29th 2008 at dawn:
Dr Eric Wang and his team are preparing two high-altitude balloons for launch in the middle of nowhere. Several payloads are tied together to form the electronic, mechanical and photograph-taking passengers for the flight to the lower stratosphere. All participating groups are waiting in suspense, trying to get some information about each operational step. Fortunately, Dr Wang uses his satellite phone to contact Brian Davis regularly. Davis provided two payloads on the first balloon, and he continuously refreshes his NXTstep blog. Furthermore, each balloon carries one important communication payload, consisting of both ham-radios that emit traceable RF waves and GPS devices that provide additional help in the retrieval of the payloads after the flight.


Luxembourg, July 29th in the afternoon:
The group follows updates of the blog and the ham-radio tracking website. Everything seems to be going perfectly for LUXPAK and the other payloads, or at least there are no messages to the contrary received. LUXPAK is wired to the second balloon that is launched about 45 minutes after the first one. Several questions are bothering the team members: Did the ground team follow the boot procedure correctly (Fig. 1)? Were the instructions precise enough? Were the protections of the ozone sensor inlet and outlet taken off? Will the software work as planned? Is LUXPAK behaving as it was designed to perform? Suddenly, the amateur radio connection breaks down. It is no longer possible to track the balloon from the Internet. What happened to the balloon? More than an hour later, the ground team finds the payloads about 50 miles from the launch area.
The LUXPAK mission
As explained in Part I, the LUXPAK robot has been designed to measure ozone concentration, air pressure, temperature (inside and outside) and reflected light from Earth during the descent. In order to commemorate the 10th anniversary of LEGO MINDSTORMS, the main controlling unit of the robot is the RCX brick.

The recovery
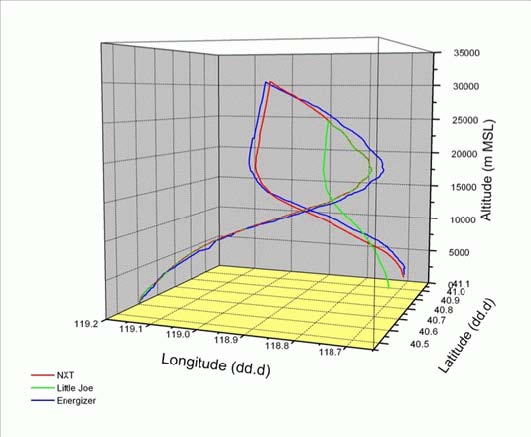
At its highest altitude, the balloon bursts and its payloads glide down by parachute. Well, “gliding” certainly is the wrong word at least for the first 10,000 m of the descent, where the speed reaches 26.5 m/s because of the lower air density. LUXPAK and its partner payloads eventually land safely near the Black Rock playa (Fig.5).

As soon as the UNR team got home, an interesting exchange between most of the participants started on the forum that was specially created for the occasion. The discussions were most useful for comments and questions. Dr. Wang had no problem extracting the data from LUXPAK with an easy-to-use LabVIEW program (Fig. 6).
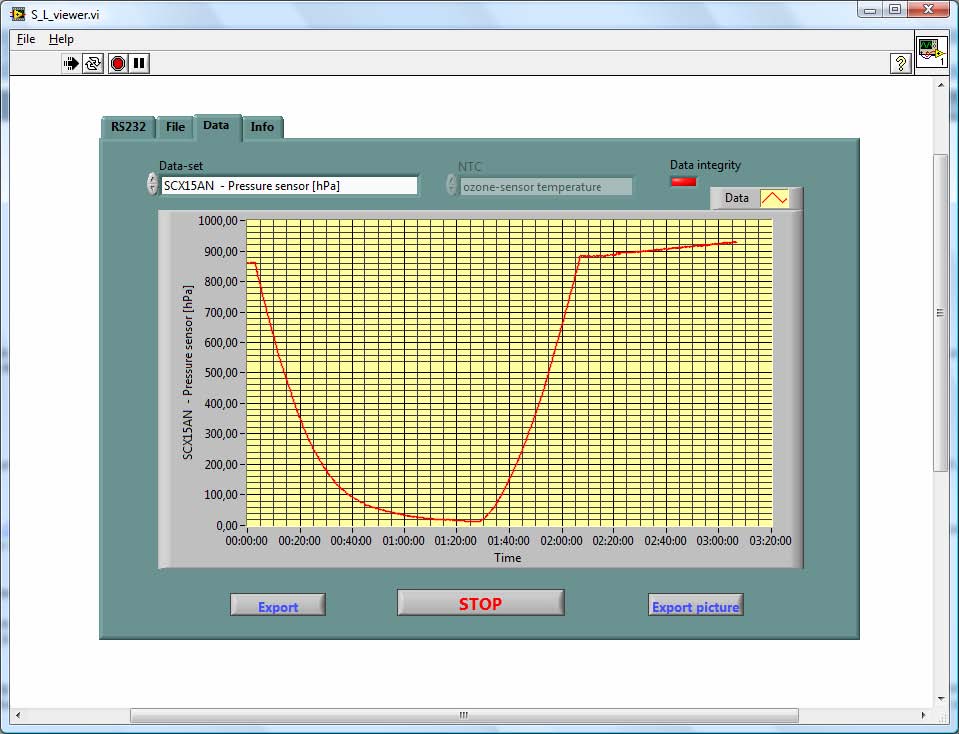
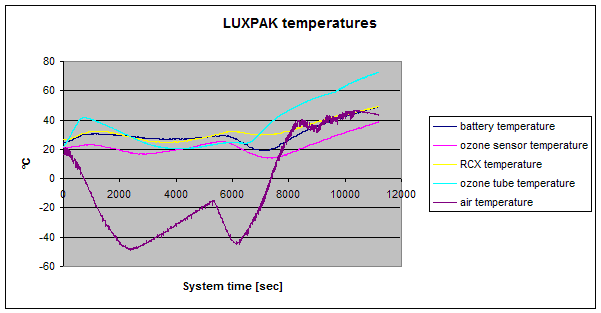
Now it time for the teachers to analyze the collected data. This is done during their vacation while they prepare the math and physics courses for the next school year starting on September 15th in Luxembourg. The pressure measurements obtained are exactly as predicted. Represented as a function of the altitude, pressure is an excellent example of an exponential function. It also seems that the back-scattered light intensity values are correct. However, the ozone sensor readings don’t correspond at all to the expected profile and leave the team puzzled. A nasty bug in the RCX program didn’t stop the ozone tube heater at the end of the mission. Therefore, the temperature inside the payload grew to nearly 50°C during the recovery of the payloads. The air temperature measurements demonstrate the temperature inversion above 17 km in altitude, but the absolute values are much too high. The reason for this seems to be that the mass of the PT100 sensor is too great for the low air density to be able to cool the sensor through convection at high altitude. The data must be processed with a pressure-dependent correction function in order to fit to the control temperature from another payload. All of the temperatures present a double arch shape that follows the air temperature inversion pattern with a certain delay (Fig. 7). Except for the heater bug at the end, the RCX was able to maintain almost constant temperature in LUXPAK’s interior.
Conclusions
The HALE event was an excellent occasion for the Luxembourg educational robotics project. The team would like to express its gratitude to the organizers, participants and sponsors of the event. LUXPAK must be considered a success, although not every aspect behaved as expected. Nothing is better for learning than a good mixture of success and failure. On one hand, the understanding and the self-confidence of problem solving is sustained, and on the other hand, a confrontation with the real world through experimentation also introduces limits and teaches a lesson of modesty. LUXPAK’s collected data now may serve as the base for practical math and physics exercises in class, hopefully inspiring future inquiry.
Claude Baumann, August 2008
CEEO
Latest posts by CEEO (see all)
- Chair for Mr Bear - 21 August 2020
- Assistive Technology: Making Lives Easier - 20 August 2020
- Sturdy Tower - 14 June 2020
- Going the Distance - 21 May 2020
- GPS accuracy testing with LEGO bricks - 10 September 2015


